News
INFO
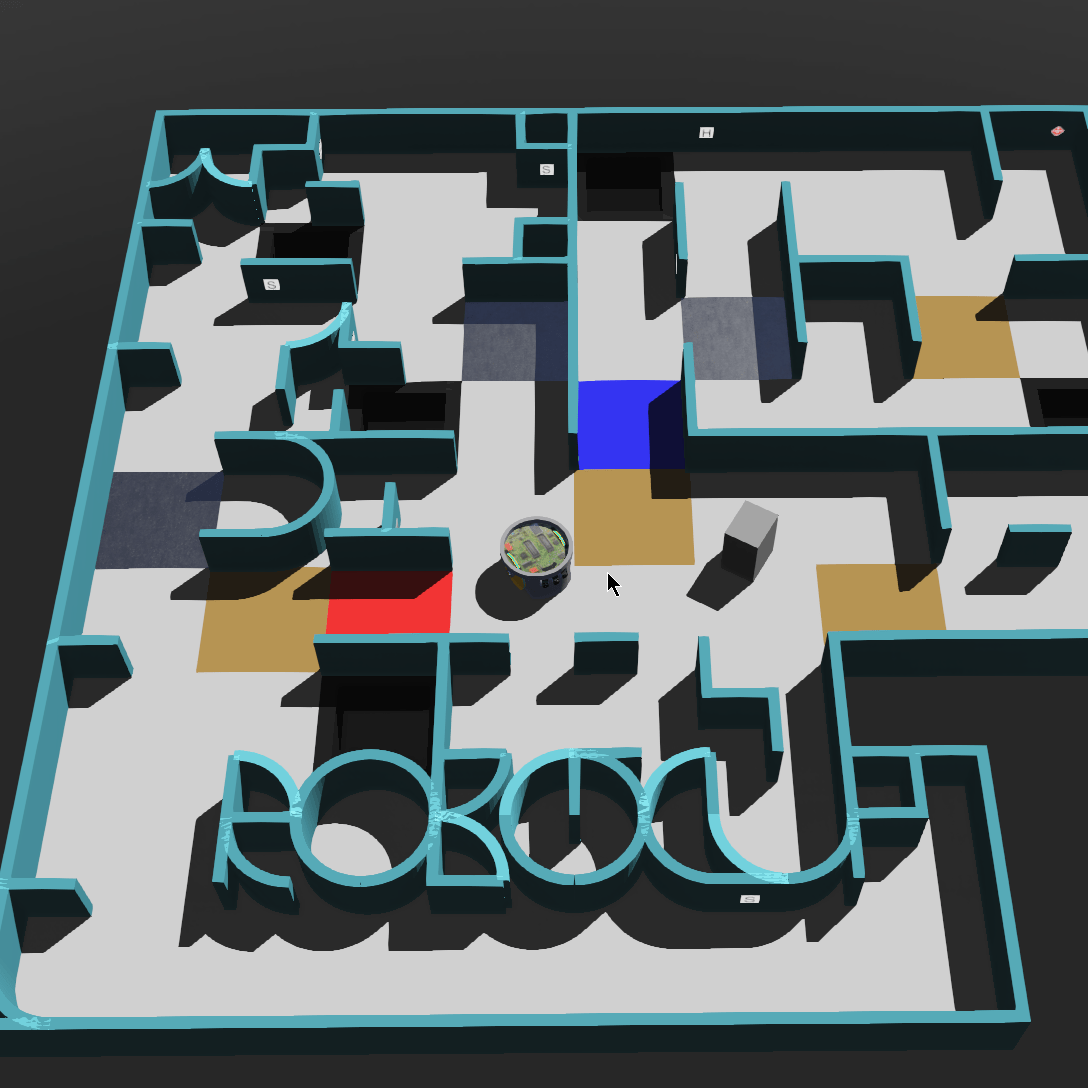
Practice Maps from 2024 have been uplaoded. Find them through the events or league-specific pages.
The scoring example / judge training guideline for 2025 rules have been published.
The templates/rubrics for 2025 rules have been published.
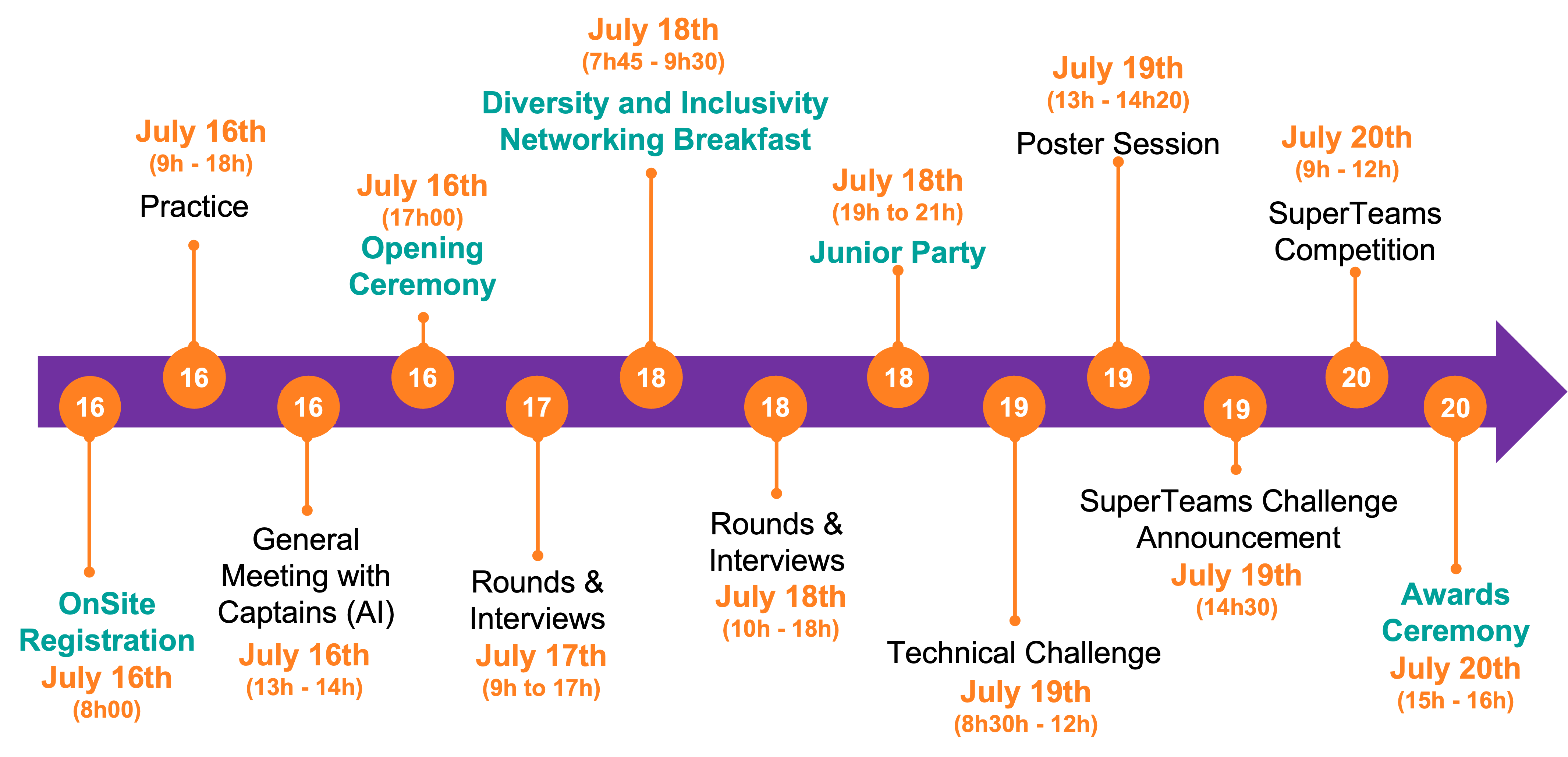
Welcome back to RoboCup2025. This years competition will be another on-site competition with even more teams. Robocup will take place in Salvador, Brazil from the 15th to the 21st of July.
It's time for RoboCup2025 Salvador!
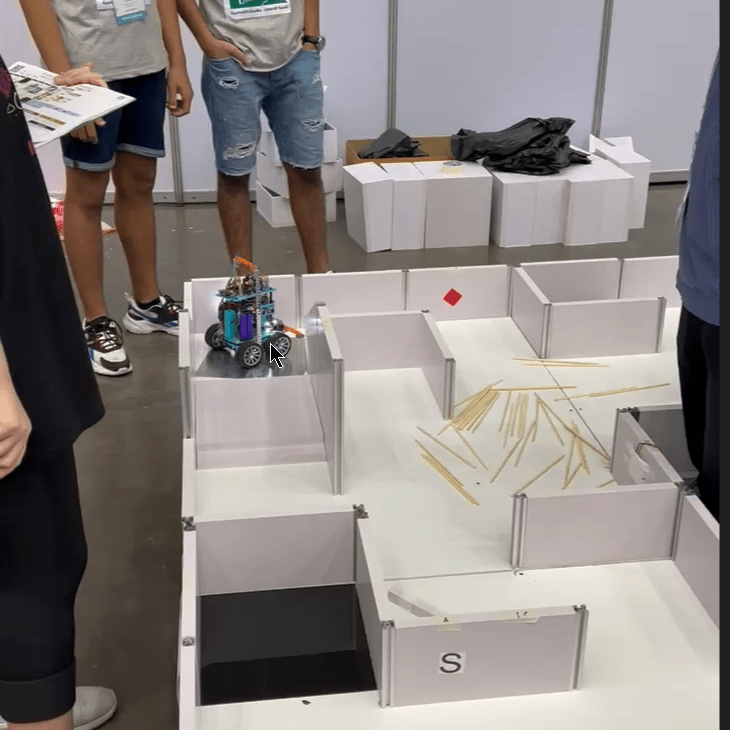
Rescue Junior
RoboCup2025
On-site competition
Superteams
Have Question?